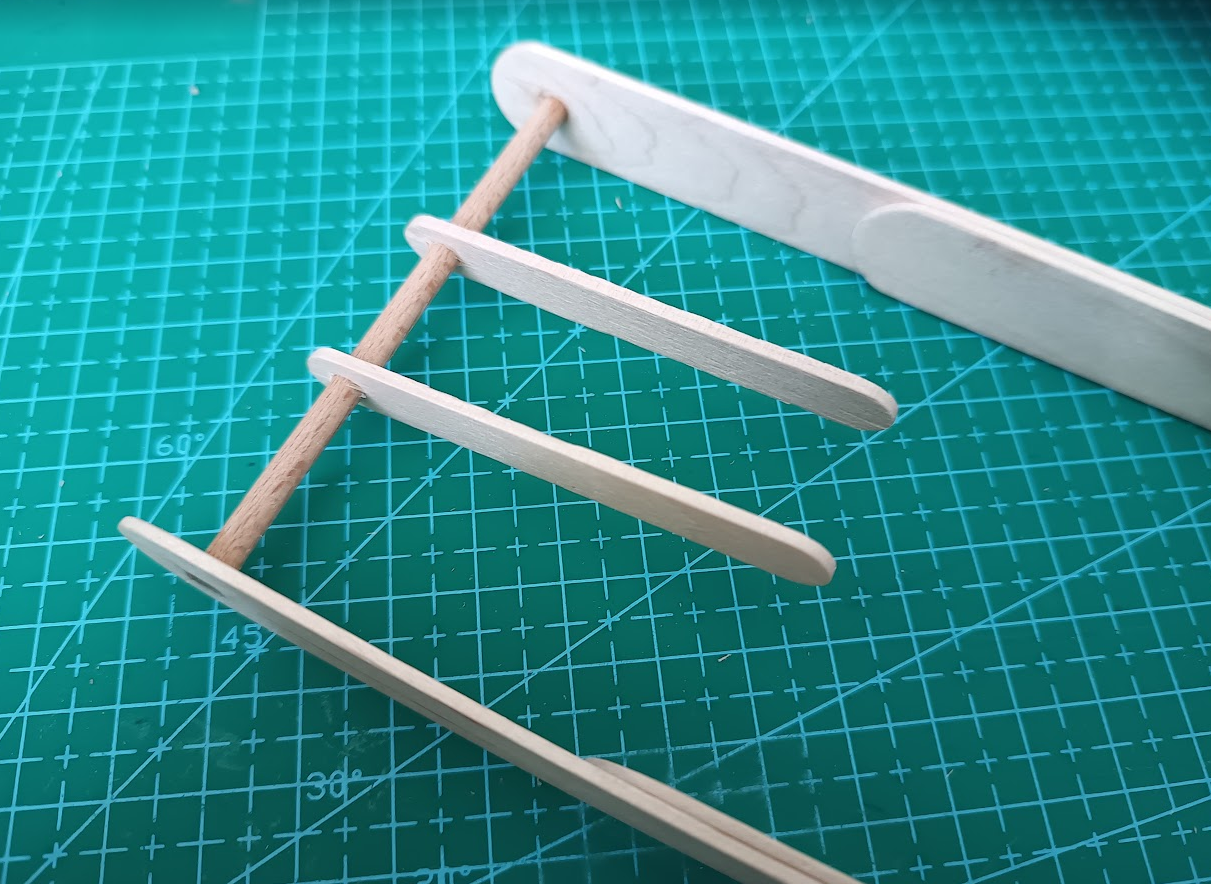
W drugiej części zajmiemy się robotem. Zaczynamy od "nóg". Standardową szpatułkę dzielimy na 2 równe częsci:

Teraz najdokładniej jak potrafimy wyznaczamy trzy punkty (w środku pomiędzy długimi krawędziami). Pierwszy punkt powinien być w odległości 0.5 cm, drugi 3 cm, trzeci 4 cm od zaokrąglonego końca szpatułki.

W wyznaczonym miejscach wiercimy wiertłem 3.2-3.5 mm, zakładając że użyjemy patyczka 3mm jako osi:

Wyznaczamy miejsce do usunięcia, tak by powstała szczelina, pomiędzy pierwszym i drugim otworem:

Bardzo, ale to bardzo ostrożnie usuwamy materiał pomiędzy otworami, tak by patyczek - oś, swobodnie się przesuwał w szczelinie:

Musimy przygotować dwa takie elementy.
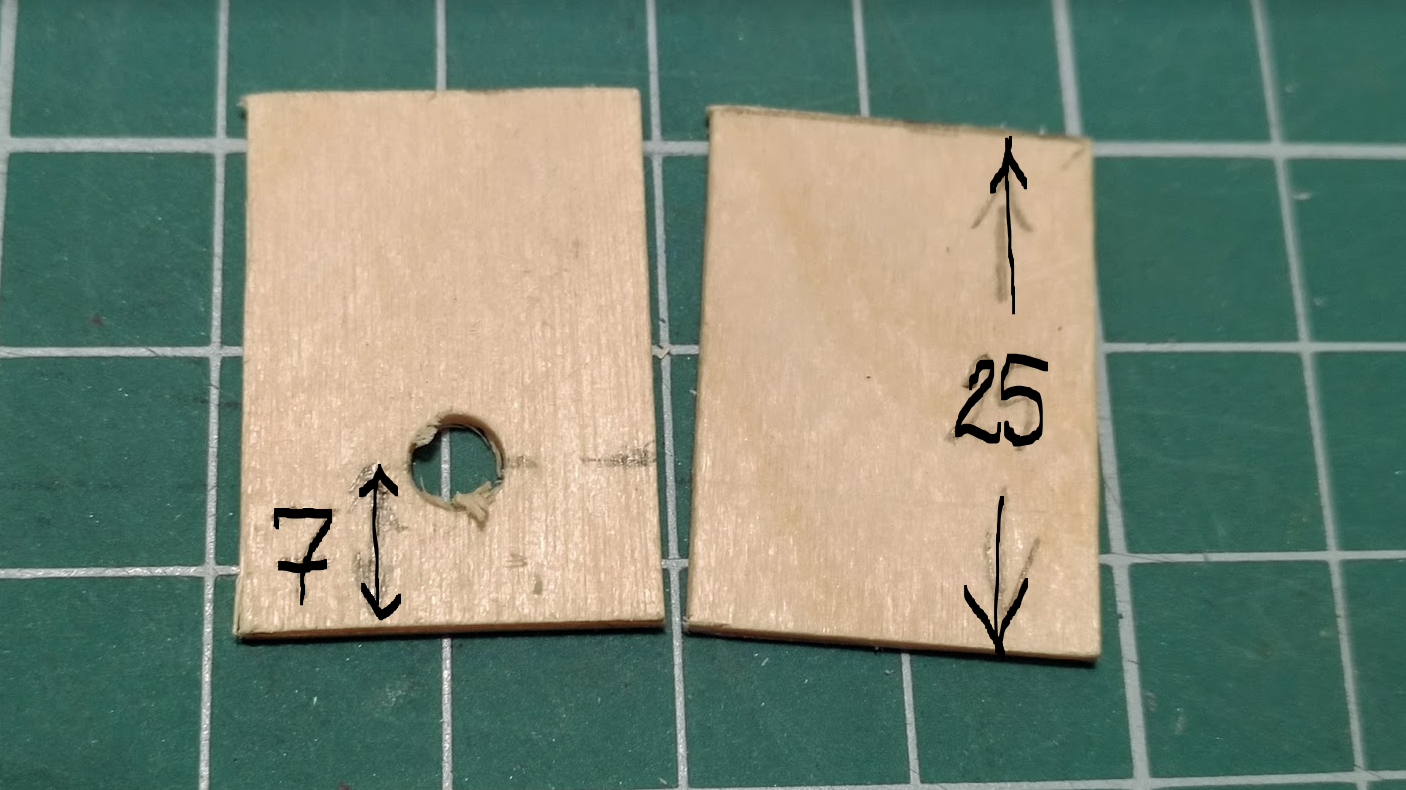
Teraz z pozostawionych końcówek (tych 2 cm) wybieramy dwie, które będą "stopami", i rysujemy symetryczną oś jak na zdjęciu poniżej.

Za pomocą kleju na gorąco przyklejamy "stopy" i nogi, dbając o zachowanie kątów prostych pomiędzy "stopami"i "nogami":

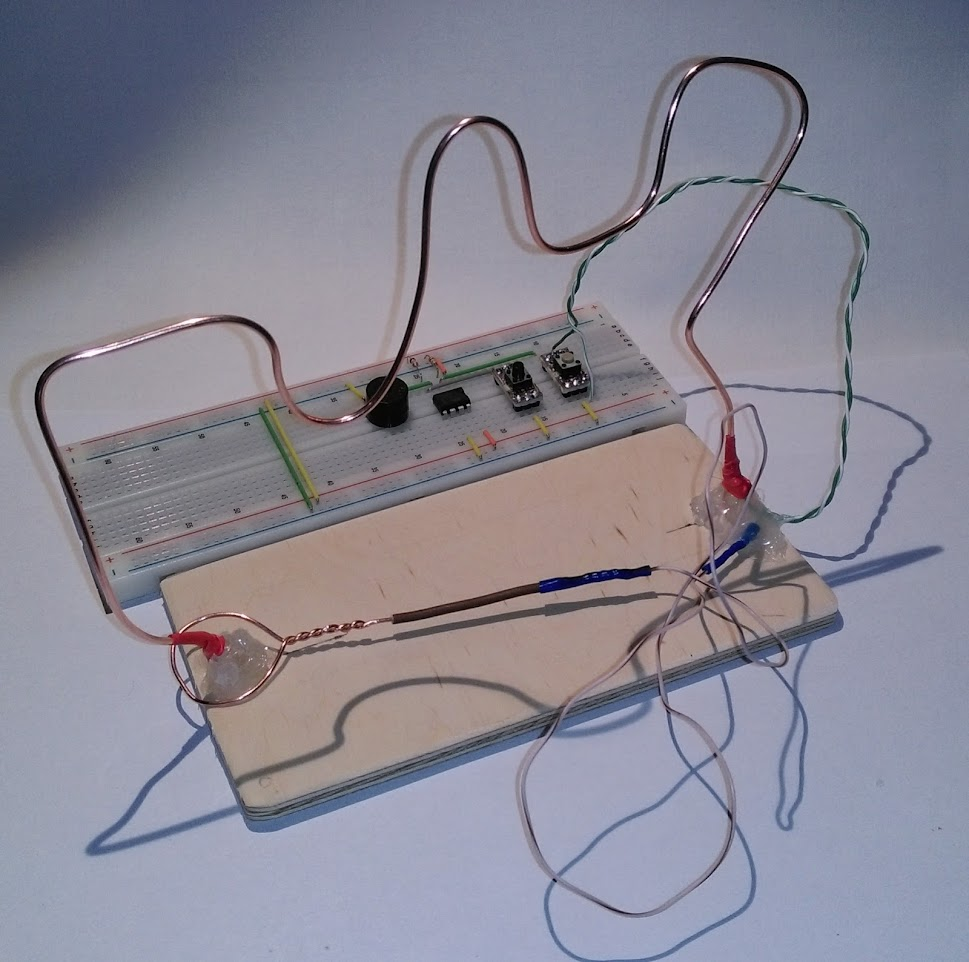
Musimy przygotować i osadzić na osi silnika dwa elementy, możemy je przygotować samodzielnie, albo wykorzystać wydruk.

Ważne,by elementy były skierowane przeciwnych kierunkach:

Musimy przygotować dwa odcinki, każdy po 1.5cm z patyczka o średnicy 3mm:

Z małych szpatułek wycinamy dwa fragmeny - jeden o długości 4 cm, drugi - 1cm. Musimy zrobić 2 takie zestawy:


Sklejamy elementy jak na zdjęciu:

Od niezaokrąglonej strony odmierzamy 1.5 cm i w środku (w stosunku do długiej krawędzi) elementów wiercimy otwory wiertłem 3mm:

Przycinamy 2 kolejne kawałki z 3mm patyczka; każdy po 2 cm, Wklejamy je w wywiercone otwory, jak na zdjęciu:

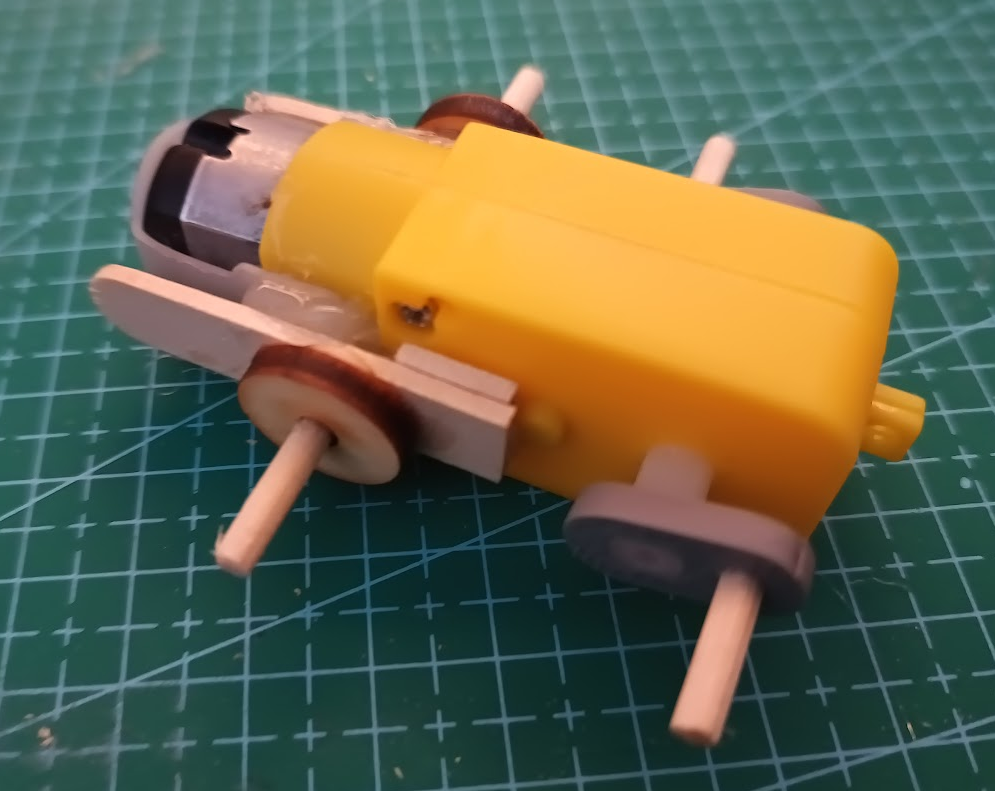
Teraz klejem na gorąco musimy przykleić drewniane elementy do silnika. Zaczynamy od boku, na którym jest wystający "bolec". Nakładamy klej, sporą ilość, a następnie dociskamy drewniany element, patyczkiem na zewnątrz. Wązne, by docisnąć element do samego bolca. Z drugiej strony przyklejamy tak, by patyczki były dokładnie na tej samej wysokości.

Możemy przykleić drewniane podkładki:
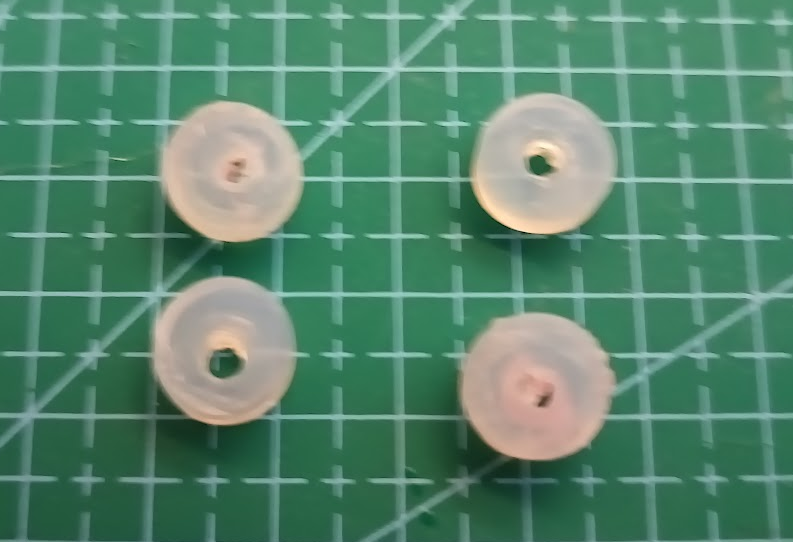
Z wkładu do pistoletu klejowego wycinamy krążki o grubości 3-5 mm i wiercimy otwór wiertłem o średnicy 3mm. Możemy użyć też kartonu - wyciąć prostokąty 1x1 cm i zrobić otwór:
Musimy ustawić oś tak, by plastikowe elementy były równoległe do długiej osi silnika:

Przymierzamy z obydwu stron, czy nogi pasują, zwłaszcza w ustawieniu z maksymalną odległością pomiędzy patyczkami:

Jeśli nogi nie pasują, brakuje max 1mm, możemy lekko podpiłować szczelinę od strony zaokrąglonego końca. Jeśli więcej, musimy wywiercić w obydwu nogach nowe otwory, 4 mm od krawędzi dolnego otworu:

Ponownie sprawdzamy i osadzamy nogi, zabezpieczając je krążkami. Pamiętajmy, by stopy były zwrócone w jednym kierunku: