Drugim projektem w tym roku będzie prosty, chodzący robot.
Do zbudowania go potrzebujemy:
- szpatułki lekarskie 6-8 szt
- Silnik DC 1:48 3-6V z podwójnym wałem 200RPM
- Koszyk na baterie AA (i baterię AA lub ogniwo LiPo 14500)
- przełącznik bistabilny
- przewód miedziany w izolacji (np. ze stkrętki)
- lutownica
- 5 cm listewkę o przekroju kwadratowym (10mm max)
- klej do drewna
- patyczki do szaszłyków o średnicy 3 mm
- klej na gorąco, klej do drewna, kropelka
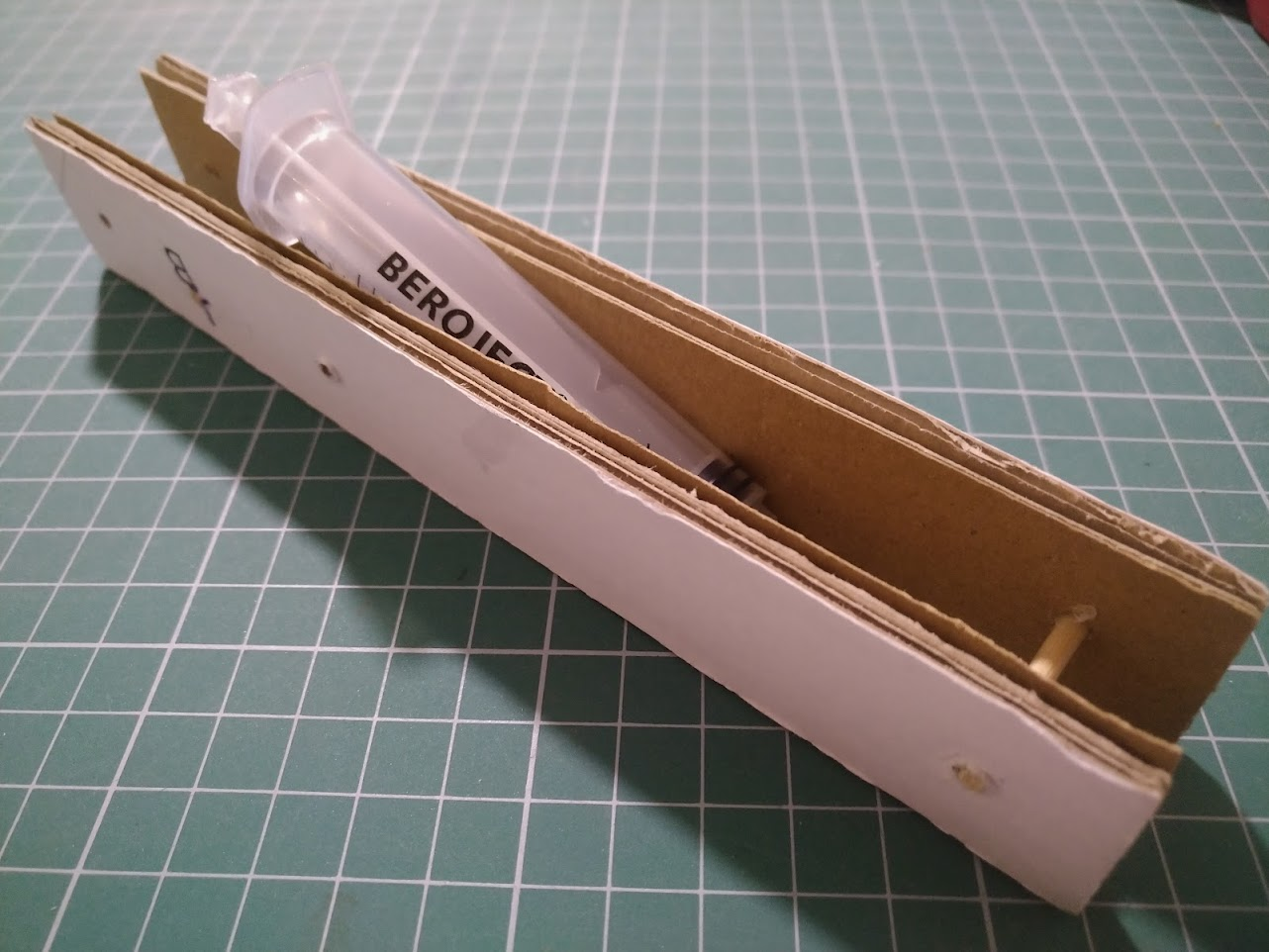
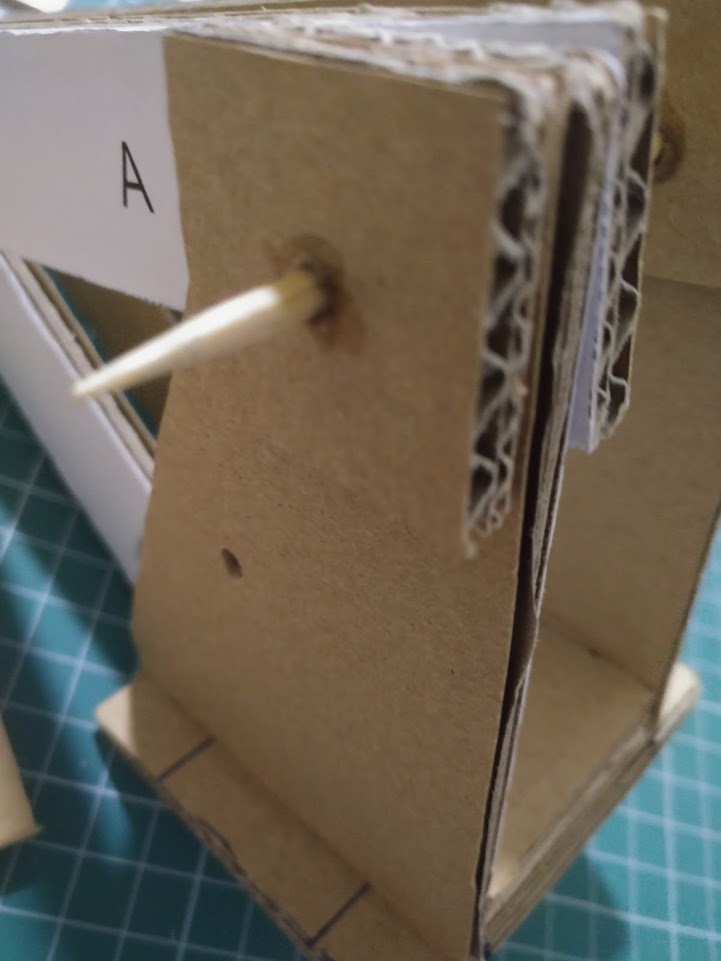
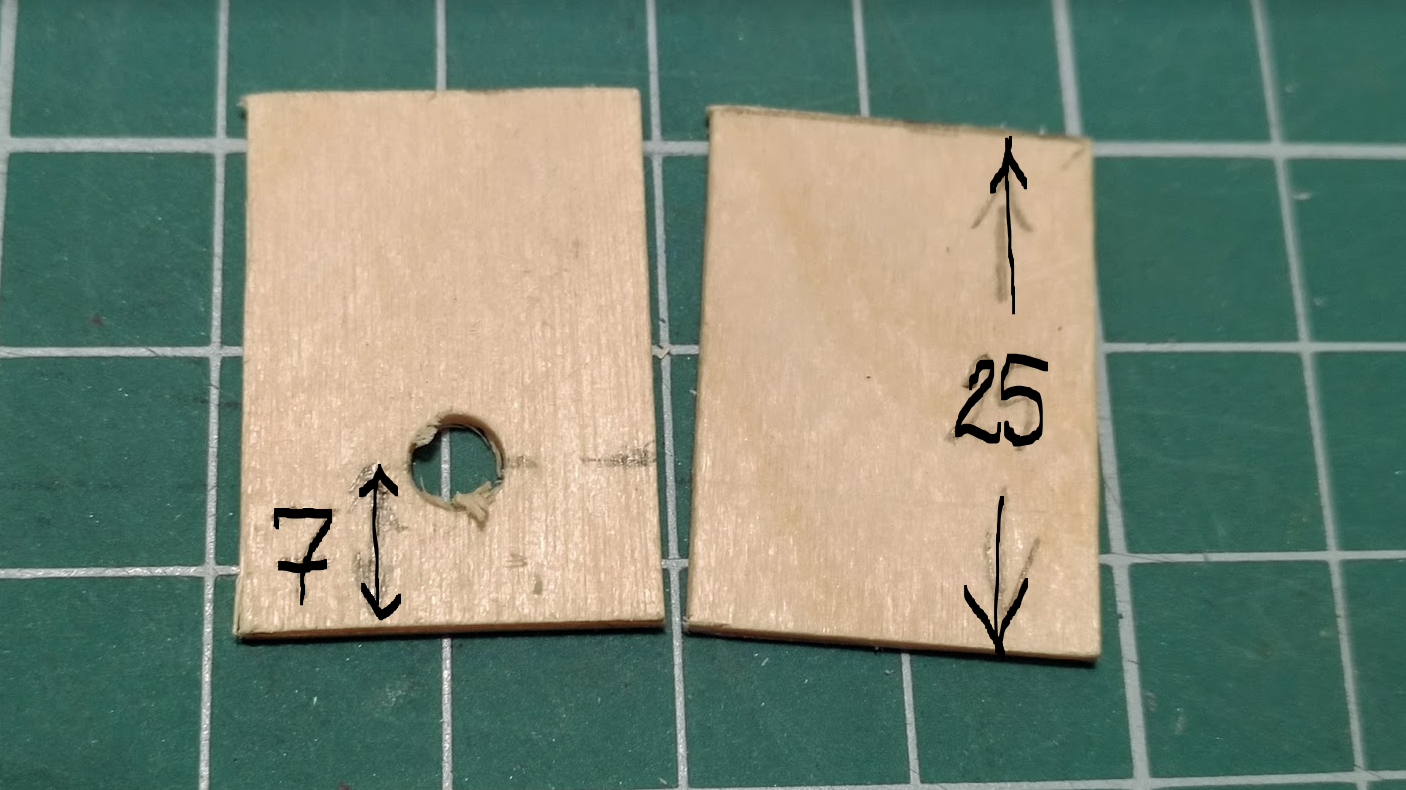
Zaczniemy od przygotowania "bloku silnika". Jedną szpatułkę przecinamy na pół i wiercimy otwór (4mm) w każdej połówce, ok 10 mm od zokrąglonego końca (symetrycznie!). Wycinamy też 2 prostokąty o długości 25mm. W jednym wiercimy otwór 4mm ok 7 mm od krawędzi. Następnie sklejamy klejem do drewna jak na fotografii poniżej, koniecznie zwracając uwagę na odpowienie ułożenie otworu.

Teraz robimy dźwignie na wał. Mamy dwie możliwości:
- Wykonujemy sami, do tego potrzebujemy 4 prostokątnych odcinków po 3 cm. Sklejamy je po dwa i wiercimy otwory 3mm w środku, w odległości od siebie 10mm. Jeden z otworów musimy rozpiłować pilnikem do kształtu prostokotą, tak by pasował na wał.
- Drukujemy dźwignie na drukarce z pliku:


Do konektorów silniczka lutujemy 2 kawałki przewodów:

Możemy też przykleić na wał silnika przygotowane elementy, upewniając się by były w przeciwnych kierunkach (jak na zdjęciu):



Teraz przygotujemy "moduł zasilania". Do połówki szpatułki przyklejamy przełącznik bistabilny (na zaokrąglonym końcu). Na tej samej płaszczyźnie, acz równo z "płaskim" końcem, przyklejamy koszyk na baterie, tak by biegun dodatni baterii był przy płaskim końcu: